Effective Modern C++:bind and lambda
Function binding
std::bind can create a function which is binded to another one:
void originalFunc(std::string a, std::string b, std::string c)
{
std::cout << a << " " << b << " " << c << std::endl;
}//original function, to be binded
void main()
{
//Newly binded function, created by bind function
auto newlyBindedFunc = bind(originalFunc, placeholders::_3, "Fixed", placeholders::_1);
//Call the newly binded function
newlyBindedFunc("New 1st", "New 2nd", "New 3rd");
}
We can see that calling
newlyBindedFunc(“New 1st”, “New 2nd”, “New 3rd”);
is exactly the same as calling
originalFunc(“New 3rd”, “Fixed”, “New 1st”);
So the bind function is just remapping the input arguments:
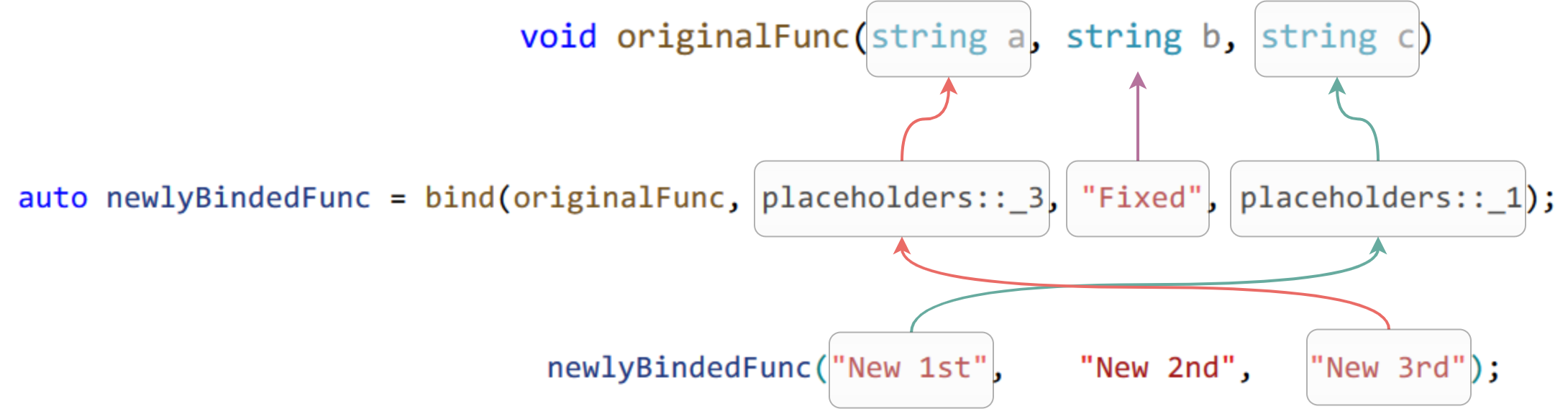
Just as the above diagram shows, using the bind in this case,
the 3rd(std::placeholders::_3) argument of newlyBindedFunc is mapped to the 1st input argument of originalFunc: string a.
the 1st(std::placeholders::1) argument of newlyBindedFunc is mapped to the 3rd input argument of originalFunc: string c.
the 2nd argument of originalFunc is already defined by std::bind as “fixed”.
Move things into Closure
Sometimes copy a object into a closure is very expensive(STL containers), we prefer moving them instead of copying them, but C++ 11 doesn’t support it.
Fortunately, we can use bind as a workaround:
vector<int> originalData{ 1,2,3,4,5,6,7 };
auto func = bind(
[](vector<int>& data)
{
for (int i = 0; i < data.size(); i++)
{
cout << data[i] << " ";
}
},
move(originalData)
);
func();
The code is straightforward, we use std::bind to create a new function func, which is binded to a lambda. The lambda has one input and it’s defined by std::bind to be move(originalData).
So actually the input argument originalData is passed by bind function, when you are really calling func(), you don’t need to pass anything.